

Click here for a high resolution photograph. |
{kind=link}
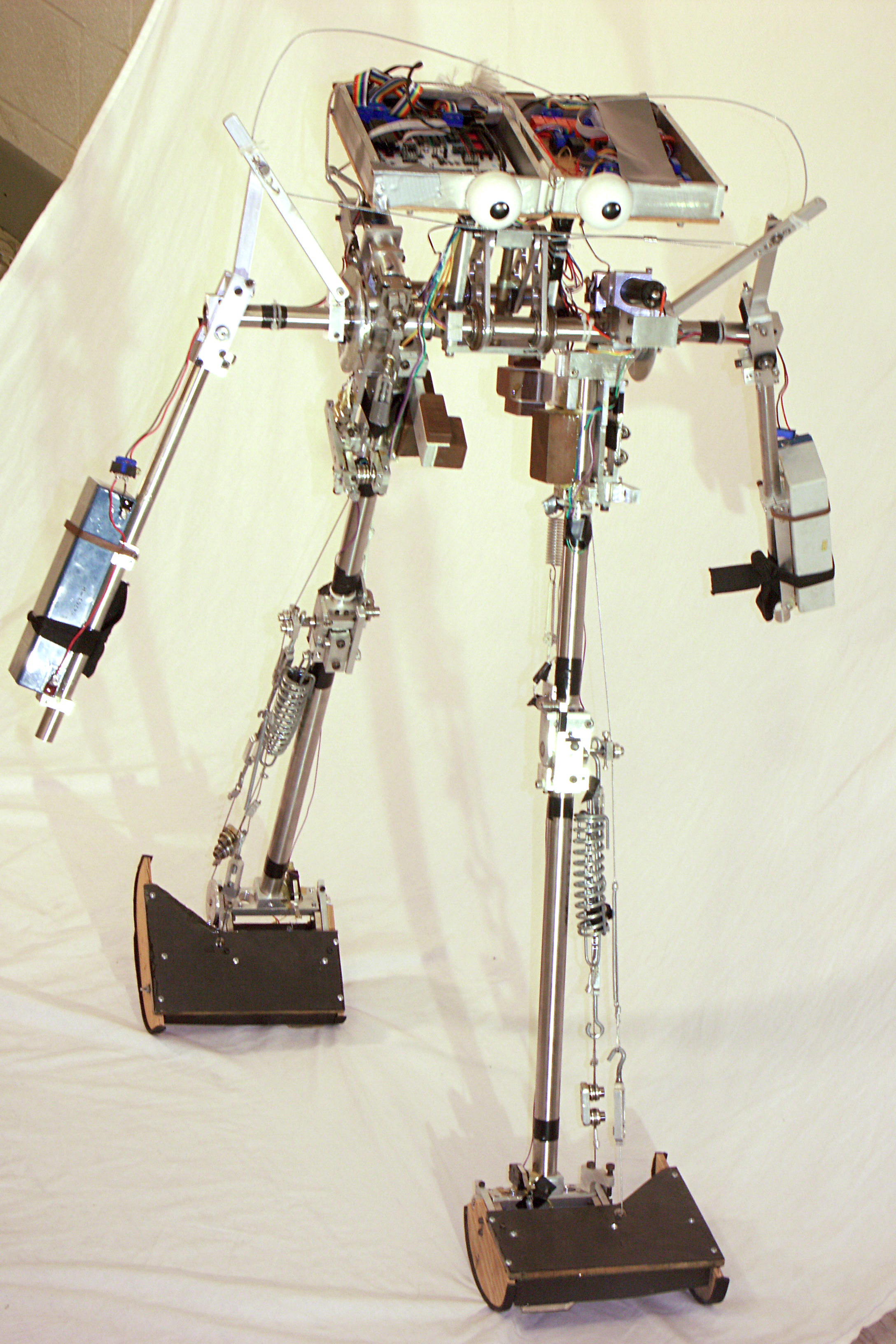
In a Feb. 17 media briefing at the annual meeting of the American Association for the Advancement of Science (AAAS), members of three independent research teams will jointly unveiling a new breed of energy-efficient, two-legged, powered robots with a surprisingly human gait. The studies will be published in the journal Science on Feb. 18, 2005.
Researchers from Cornell University and the Massachusetts Institute of Technology (MIT), and their colleagues from Delft University of Technology in the Netherlands, will display footage of all three bipedal robots and demonstrate the MIT biped.
"These innovations are a platform upon which others will build," says Michael Foster, NSF expert on computer and information science and engineering and one of the managers who oversaw this research. "This is the foundation for what we may see in robotic control in the future."
By applying concepts rooted in "passive-dynamic walkers"--devices that can walk down a shallow slope powered only by the pull of gravity--the engineers have crafted robots that, in the case of the Cornell biped, can walk on level ground yet use as little as one-half the wattage of a standard compact fluorescent bulb.
"The biped walking mechanism in robots is limited by on-board battery power," says Junku Yuh, NSF expert on intelligent systems, who also oversaw the research. "The Cornell team's passive mechanism helps greatly reduce the power requirement. Their work is very innovative."
Representing fundamental developments in computer and mechanical control, the robots are helping researchers understand bipedal motion and revealing processes that underlie human locomotion and motor learning. Applications are already on the horizon, with one researcher exploring how the new approach to robotics can aid development of increasingly energy-efficient prosthetic devices.
"This is a perfect example of a single concept yielding benefits in a variety of fields, including medicine," says NSF program officer Gil Devey, an NSF expert on disabilities research who also oversaw the projects.
The MIT walker provides a platform to study motor learning with a passive-dynamic design. In simple terms, the robot can teach itself to walk in as little as 10 minutes, adapting to terrain as it moves.
"This project is about the fundamentals of control," says Foster. "The researchers have combined our developing knowledge of computerized control with mechanical principles that the world provides for us and shown that we can integrate the two."
All three robots verify a long-held hypothesis that suggests motors can substitute for gravity in passive-dynamic walking devices. A slope is not required, only careful engineering.
Reporters interested in attending the press briefing should go to the Taft Room, Marriott Wardman Park Hotel, Washington, D.C. Please arrive no later than 9:45 am to obtain a badge for the briefing. Be prepared to show a photo ID and press credentials.
A companion press release from Cornell University can be found at: http://www.news.cornell.edu/releases/Feb05/AAAS.Ruina.bipedal .ws.html
A companion press release from MIT, and additional images, can be found at: http://web.mit.edu/newsoffice/index.html
Co-authors for the paper, "Efficient bipedal robots based on passive-dynamic walkers," are Steve Collins, Mechanical Engineering, University of Michigan; Andy Ruina, Theoretical and Applied Mechanics, Cornell University; Russ Tedrake, Brain and Cognitive Sciences, MIT; and Martijn Wisse, Mechanical Engineering Delft University of Technology.
The Cornell robot was developed by Steven Collins with suggestions from Andy Ruina. The MIT robot was developed by Russ Tedrake and Teresa Weirui Zhang with help from Ming-fai Fong and Derrick Tan in the lab of H. Sebastian Seung. The Delft robot was developed by Martijn Wisse and Jan van Frankenhuyzen, with help from Arend Schwab.
In addition to NSF support, the research was funded in part by the Dutch Technology Foundation (Stichting Technische Wetenschappen - STW) and the Packard Foundation.
NSF Award: BES-9806612 (ENG) http://www.nsf.gov/awardsearch/showAward.do?AwardNumber=9806612
NSF Award: CCF-0122419 (CISE) http://www.nsf.gov/awardsearch/showAward.do?AwardNumber=0122419
NSF Award: IIS-0413139 (CISE) http://www.nsf.gov/awardsearch/showAward.do?AwardNumber=0413139
Media Contacts
Dena Headlee, NSF (703) 292-8070 dheadlee@nsf.gov
Joshua A. Chamot, NSF (703) 292-8070 jchamot@nsf.gov
Bill Steele, Cornell University (607) 255-7164 ws21@cornell.edu
Ginger Pinholster, AAAS/Science (202) 326-6421 gpinhols@aaas.org
Elizabeth Thomson, MIT News Office (617) 258-5402 thomson@mit.edu
Sherry Lassiter, NSF/MIT Center for Bits and Atoms (617) 253-4651 lass@cba.mit.edu
Sonja Knols-Jacobs, Dutch Technology Foundation, STW +15 30 600 1298 s.knols@stw.nl
Maarten van der Sanden, Delft University of Technology +31 15 278 5454 M.C.A.vanderSanden@TUDelft.NL
Video news release and b-roll package available Contact Dena Headlee, (703) 292-7734, dheadlee@nsf.gov
Program Contacts
Junku Yuh, NSF (703) 292-8930 jyuh@nsf.gov
Gilbert Devey, NSF (703) 292-7943 gdevey@nsf.gov
Michael J. Foster, NSF (703) 292-8910 mfoster@nsf.gov
Co-Investigators
Andy Ruina, Cornell University (607) 255-7108 ruina@cornell.edu
Steven Collins, University of Michigan (734) 763-5302 shc@umich.edu
Russ Tedrake, Massachusetts Institute of Technology (617) 324-4307 russt@ai.mit.edu
Martijn Wisse, Delft University of Technology +31 - 15 - 2786 m.wisse@wbmt.tudelft.nl
Related Websites
NSF/MIT Center for Bits and Atoms: http://cba.mit.edu
Steve Collins homepage: http://www-personal.engin.umich.edu/~shc/
Andy Ruina homepage: http://tam.cornell.edu/~ruina/
Russ Tedrake homepage: http://hebb.mit.edu/people/russt/
Martijn Wisse homepage: http://mms.tudelft.nl/dbl/Members/martijn/
The National Science Foundation (NSF) is an independent federal agency that supports fundamental research and education across all fields of science and engineering, with an annual budget of nearly $5.47 billion. NSF funds reach all 50 states through grants to nearly 2,000 universities and institutions. Each year, NSF receives about 40,000 competitive requests for funding, and makes about 11,000 new funding awards. The NSF also awards over $200 million in professional and service contracts yearly.
Receive official NSF news electronically through the e-mail delivery and notification system, MyNSF (formerly the Custom News Service). To subscribe, visit www.nsf.gov/mynsf/ and fill in the information under "new users".
Useful NSF Web Sites:
NSF Home Page: http://www.nsf.gov
NSF News: http://www.nsf.gov/news/
For the News Media: http://www.nsf.gov/news/newsroom.jsp
Science and Engineering Statistics: http://www.nsf.gov/statistics/
Awards Searches: http://www.nsf.gov/awardsearch/
Journal
Science